Live

Live
Live
Live

Live


Live
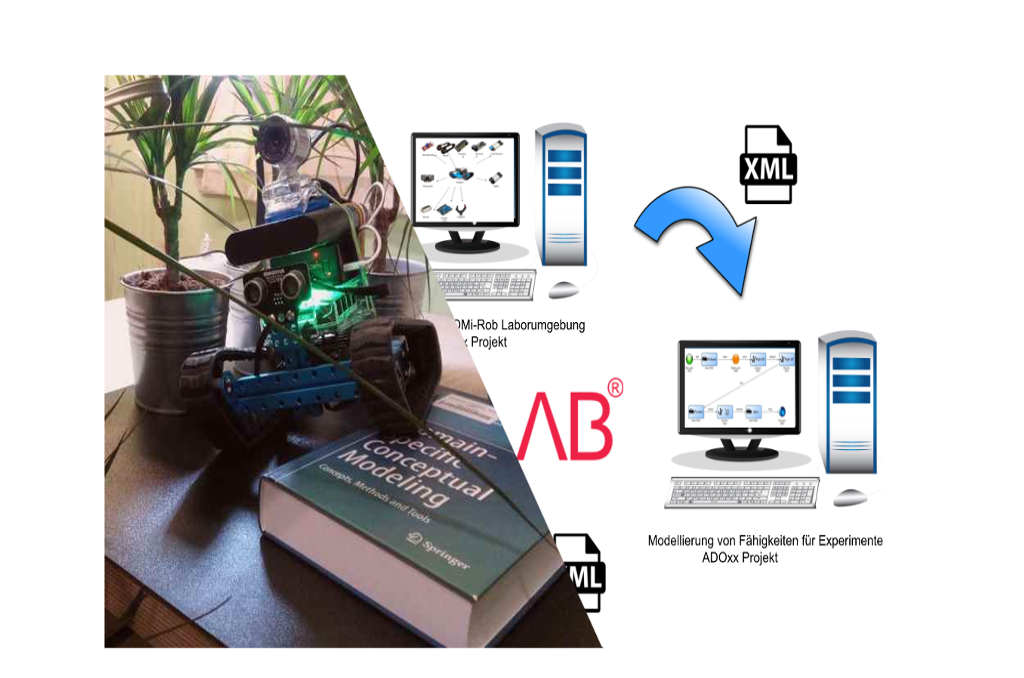





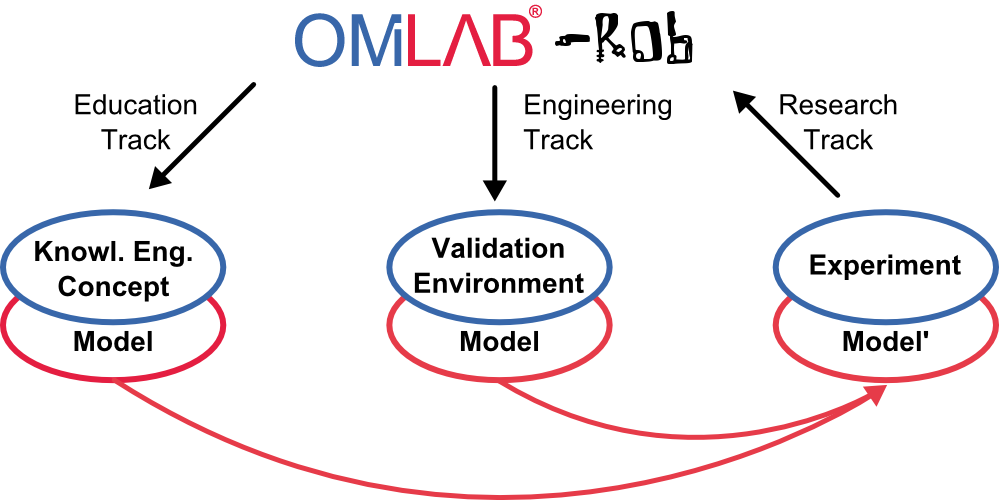
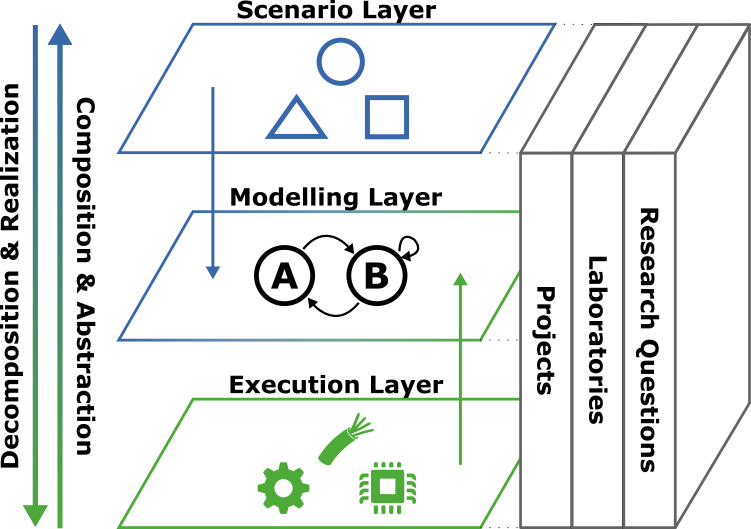
Driven by the development plan of the Univerity of Vienna, and inspired by the Open Models (OMi) Laboratory, the OMiLAB-Rob project provides a dedicated research and experimentation space to understand, model, and engineer the knowledge-intensive systems of the future. Both a physical and virtual place, OMiLab-Rob links together