
Use Case
(Karagiannis and Kühn, 2002)
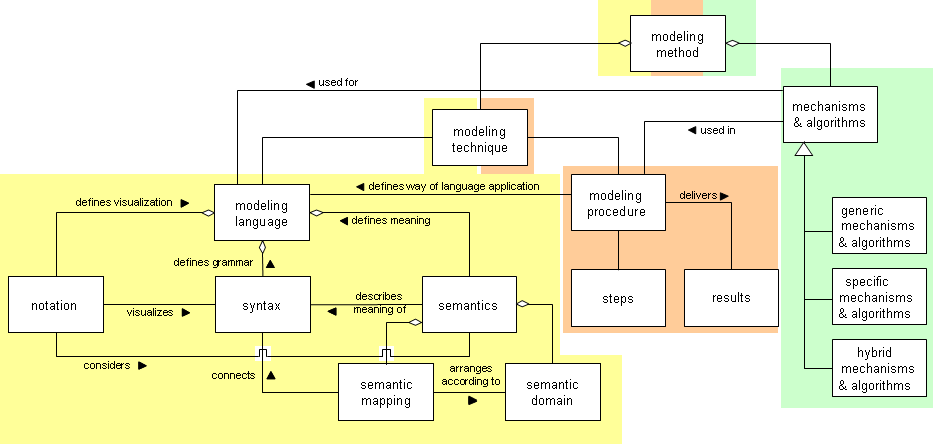
Capturing the relevant characteristics of a system with domain-specific (or even case-specific) precision benefits the analysis of existing systems and the creation of new systems. To capture characteristics of a system, a modeling method is required. Consequently, modeling methods are engineered for a certain purpose, and the goal of this experiment is to validate
- Conceptual Modeling and
- Agile Modeling Method Engineering (AMME)
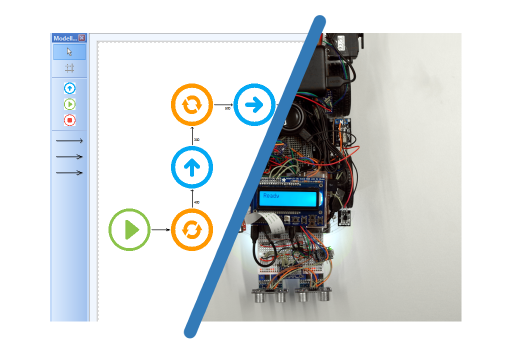
Conceptual Modeling supports the engineering of modeling methods, where invariants in modeling methods enable reusability across domains. AMME evolves modeling methods iteratively based on changing modeling requirements and feedback loops.
Experiment
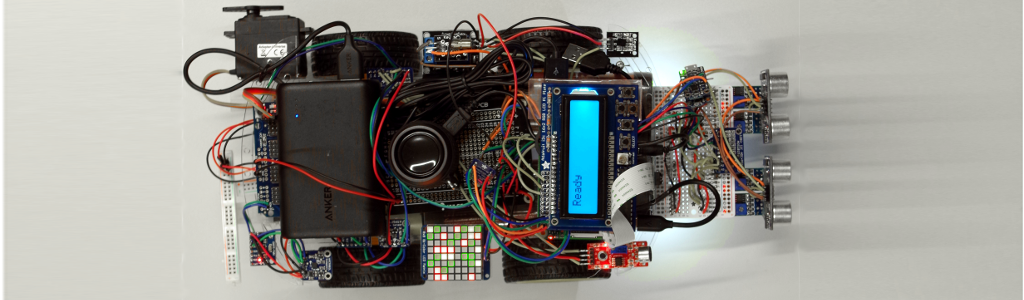
This validation environment uses an autonomous vahicle controlled by a Raspberry Pi 2. Motors run on 7.2v power. Sensors and actuators are controlled on 3.3v and 5v logic.
Actuators
- 4 Independently Controlled Wheels
- 16 Servos max
- Laser
- Speaker
- Buzzer
- LCD Display
- RGB Matrix
Sensors
- Microphone
- Camera
- 4 Analog Line Sensors
- 4 Digital Line Sensors
- 2 Color Sensors
- 2 Distance Sensors
- Noise Sensor
- Temperature Sensor
- Accerometer
- Gyroscope
- Compass
- Lux Sensor
- ...
Integration in the OMiLab Portal is archieved by consolidating REST interfaces in a microservice. REST endpoints are automatically generated for each device of the autonomous vehicle.
The OMiCarPoc1 can be called via a REST service. The root address of the web services is:
http://austria.omilab.org/omirob/omicarpoc1/rest
